
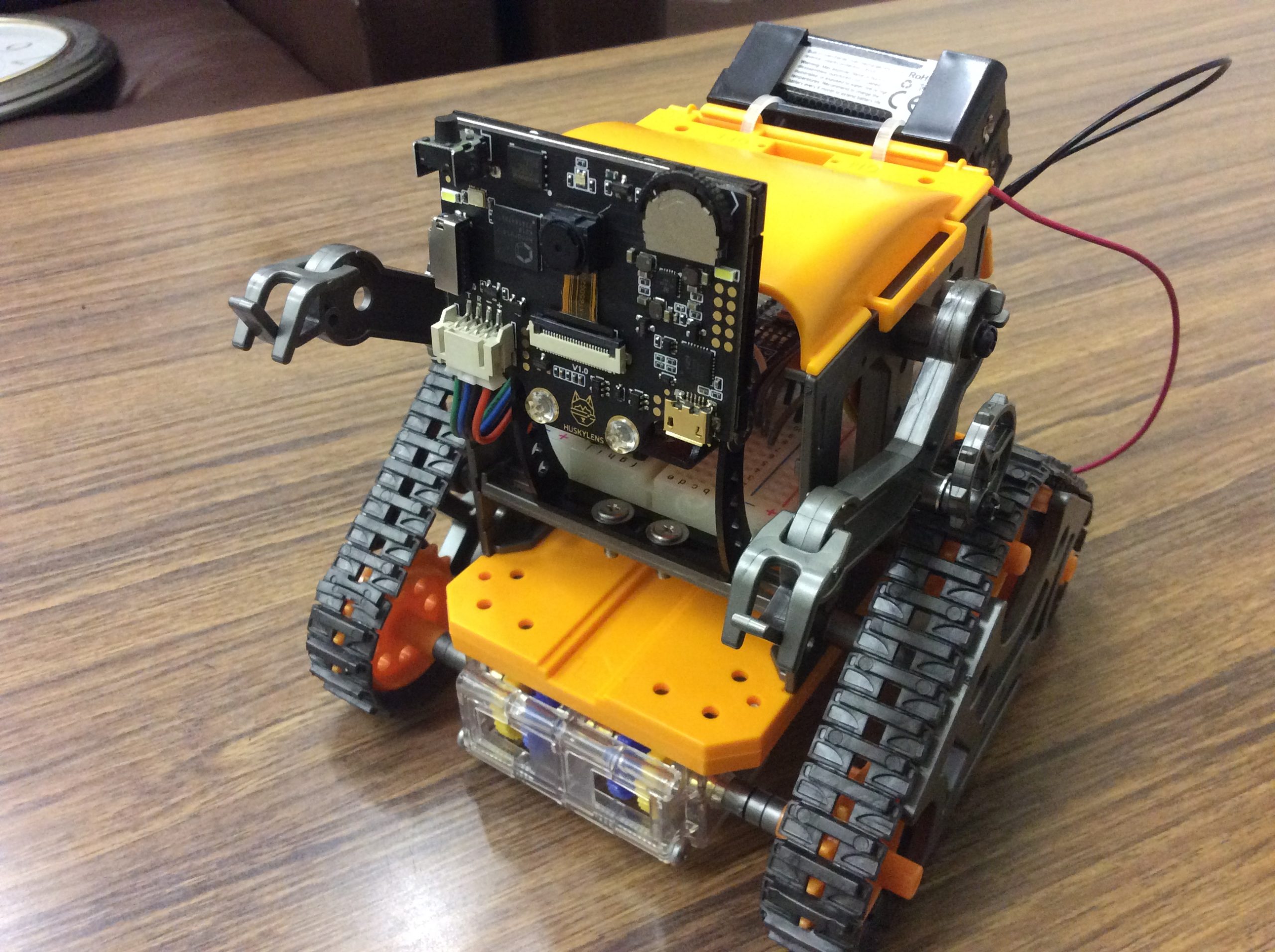
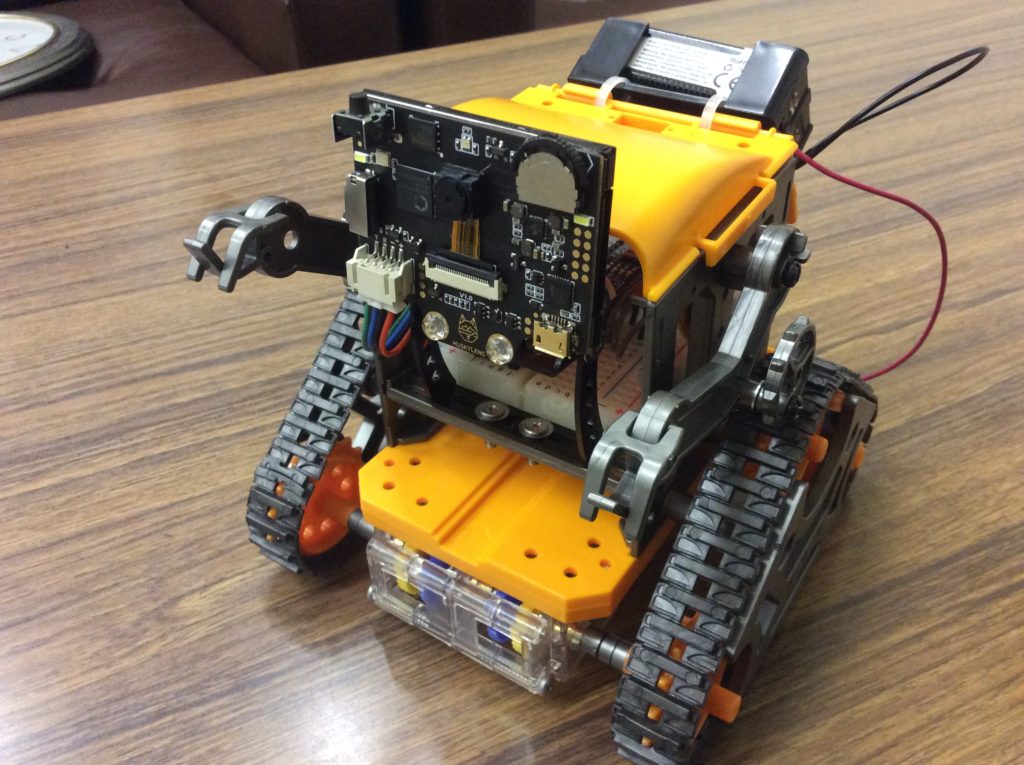
先日購入したHUSKYLENSとARDUINOでタミヤのカムプログラムロボットを AIロボット にしてみました。
ここのObject Tracking Robot using Arduino and HuskyLens | Arduino AI Tutorialという記事を参考にして、記載されているコードをベースにちょこっと改造してみました。ただ、このコードはちょっと注意する必要があって、「Serial.println(F(“1.Please recheck the “Protocol Type” in HUSKYLENS (General Settings>>Protocol Type>>Serial 9600)”));」という部分の「”Protocol Type”」を「Protocol Type」という風に「””」を削除しないとエラーになってしまいます。
今回はarduino nano とモータードライバーにDRV8835モジュールを使うことにしました。とりあえず動かしてみたのがこちらです。
けっこう面白い感じで動きました!こんなのが手軽に作れるなんて凄いですよね~。
ただこのHUSKYLENSはやっぱりお手軽モジュールでなので、物体検知も完ぺきではありません。画面に映ってる他のものと明確に違うものはよく追えるのですが、そうでないと結構ロストしてしまいます。あと、モータースピードも調整しないと、あっという間に画面から対象物が外れてしまってこれまたロストしてしまいます。コード的に、画面に映るものの大きさで動くようになってますので、対象物にあわせての動きも変える必要があります。
けど、それをさておいてもこんなに簡単に遊べるのはやっぱり面白いので、顔認証や線認証とかでも色々やってみたいです。
>工作室へ
 (1 いいね!)
(1 いいね!)

コメント