
前々から作ってみたかった 倒立振子 に挑戦してみました。ネットの制作例を見たところ、B-ROBOT EVO 2. Much more than a self balancing roboをベースに作られている方が多く、それを元にghmartin77/B-ROBOT_EVO2_ESP32とOLDMAKERS様の「ESP32で作る倒立振子」と、Paradiseの何でも工作室様の「ESP32 Evo2タイプロボットを作る その1、2,3」を参考にさせて頂きました。皆様ありがとうございます!
まず、とりあえずパーツを揃えようとした中で最大の謎(?!)は、ステッピングモーターに何を使えばいいのか?でした。NEMA17シリーズを使えばいいとのことなのですが、違いがよく分からず、悩んだ結果、秋月電子の「バイポーラ ステッピングモーター SM-42BYG011」にしました。電源は18650電池二つで8v前後の予定なのですが、ステッピングモーターの定格電圧が12vとなっていて、動くのかな??と心配したのですが、結果的には動きました。
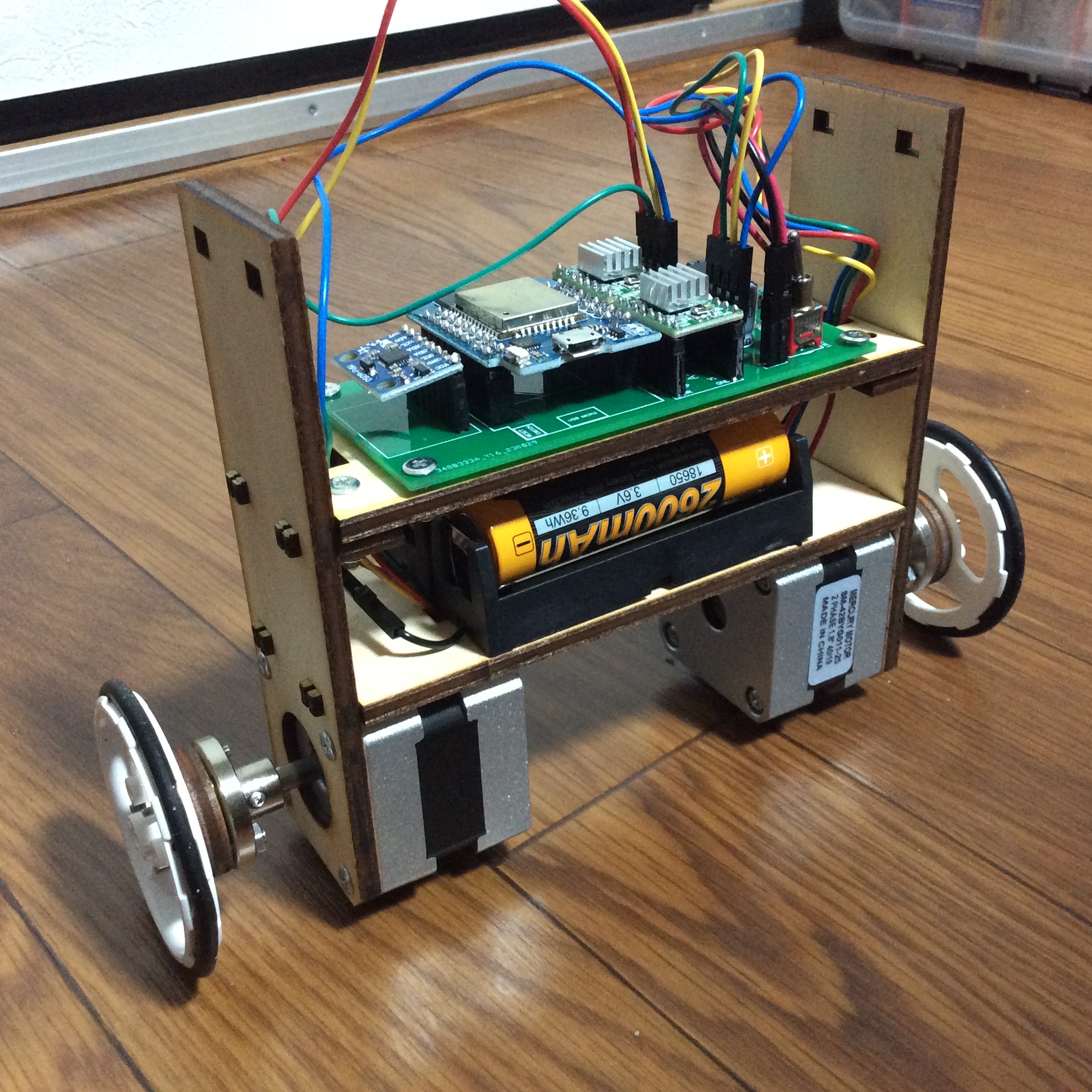
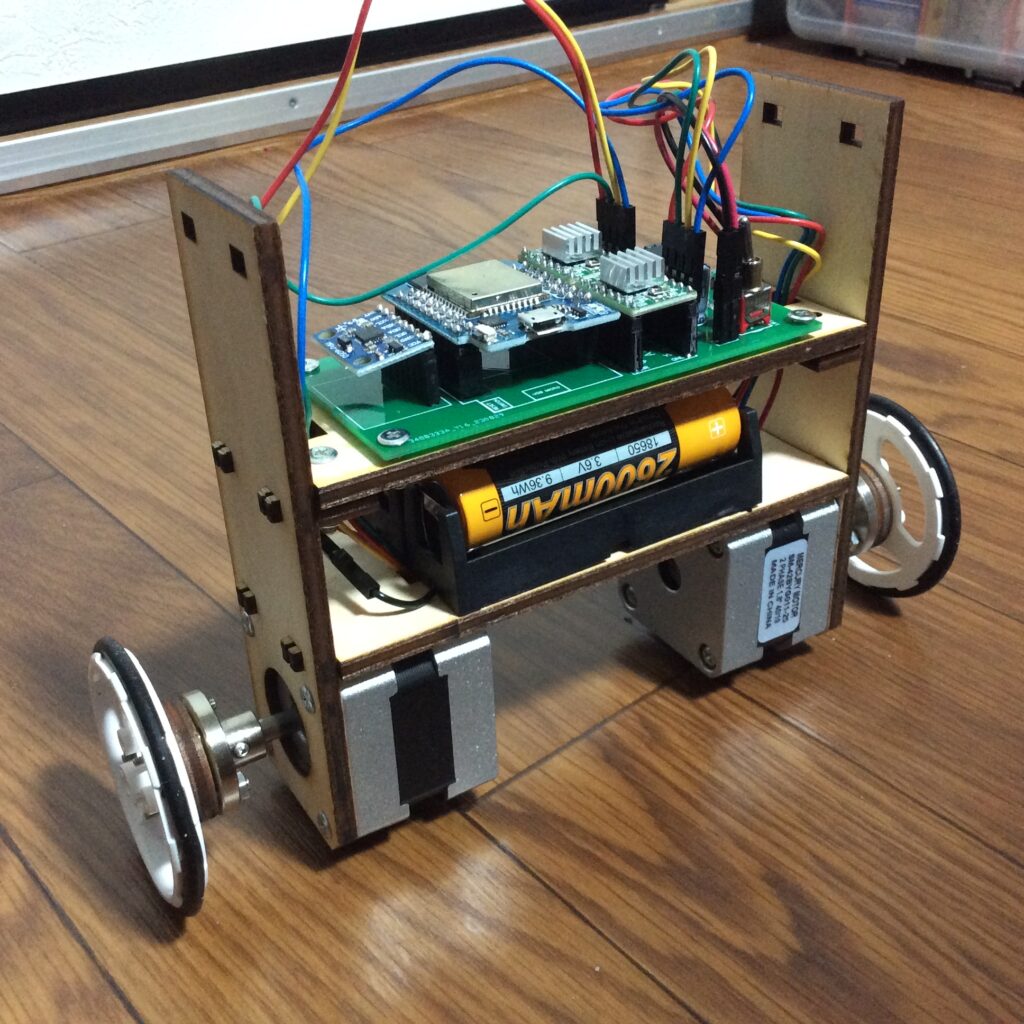
構成的には、電源を18650電池(3.7v)×2、マイコンにESP32 MH-LIVE Mini Kitを使い、モータードライバーはA4988、ジャイロスコープはMPU6050にしました。タイヤはタミヤのスリムタイヤを使ってます。サーボモーターも付けれるようにしてありますが、とりあえず基本構造で試作してみました。基板はJLCPCBで発注しました。筐体はレーザーカッターで作っています。
そして本体完成後に思わぬ事態が!?なんとAndroidの操作用のスマホアプリの更新が終わっていて、最近のスマホではアプリがダウンロード出来ないのです。。ios版の方はDLの画面すら出てきませんw慌てて捨てようと思ってた古いAndroidタブレットを引っ張り出してみたところ、無事DL出来ました。ちなみにスマホアプリが無くても倒立自体はちゃんと出来ます。
なんだかんだ無事倒立したのですが、通常状態ではまだフラフラしてしまっていますw
ちょっと調整しないとですね~。もしかしたらステッピングモーターが合わないのかもとも思いますが、動くには動くので個人的には満足です。
>工作室へ


コメント