

前回、インセクトマシンをリモコン化したのですが、それを 遠隔操作 出来るように改造してみました。ただ、そのためにはいくつか改良しなくてはいけないところがありました。
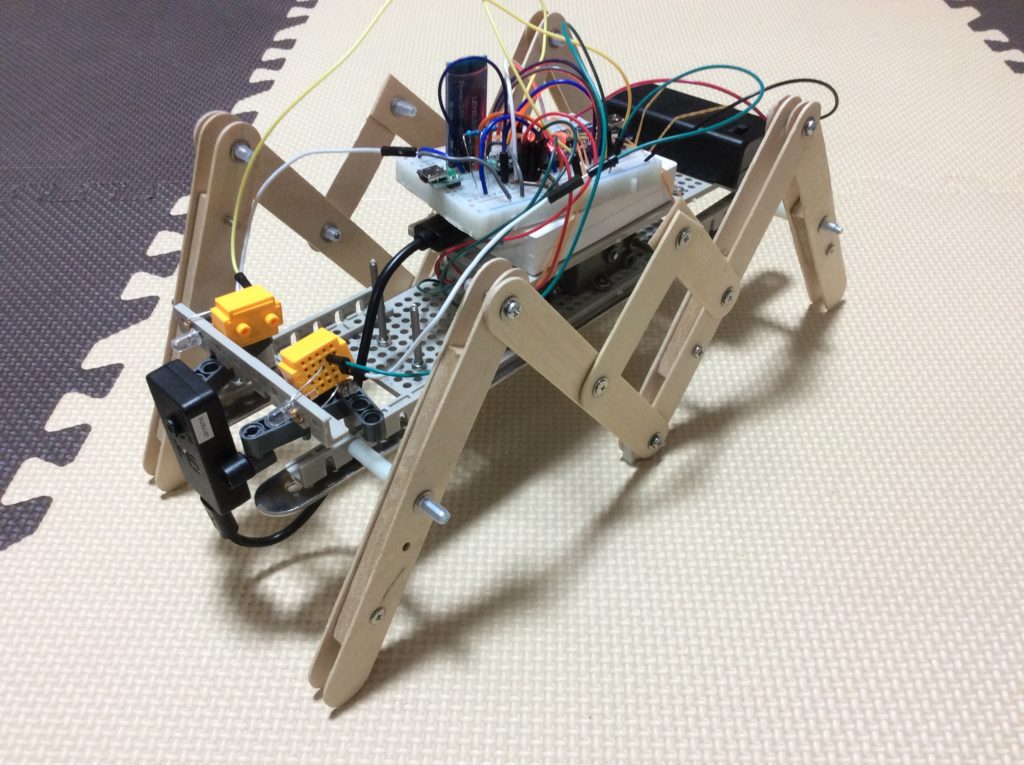
ボディの強化
今までものだと、足回りが弱くて、機材を乗せるには強度不足でした。そこで、足に使ってるアイススティック棒で100均のMDF材をサンドすることにしました。これで、ボデイの横ブレを抑え耐荷重もアップ。それと同時にこれまた100均のステンレス固定プレートを使って、本体胴体部分のタミヤユニバーサルプレートの下に渡して補強しました。これでかなり耐久性が上がり、歩行時の安定性も増しました。ついでに中足に消しゴムをセットして、グリップ力も増強しました。
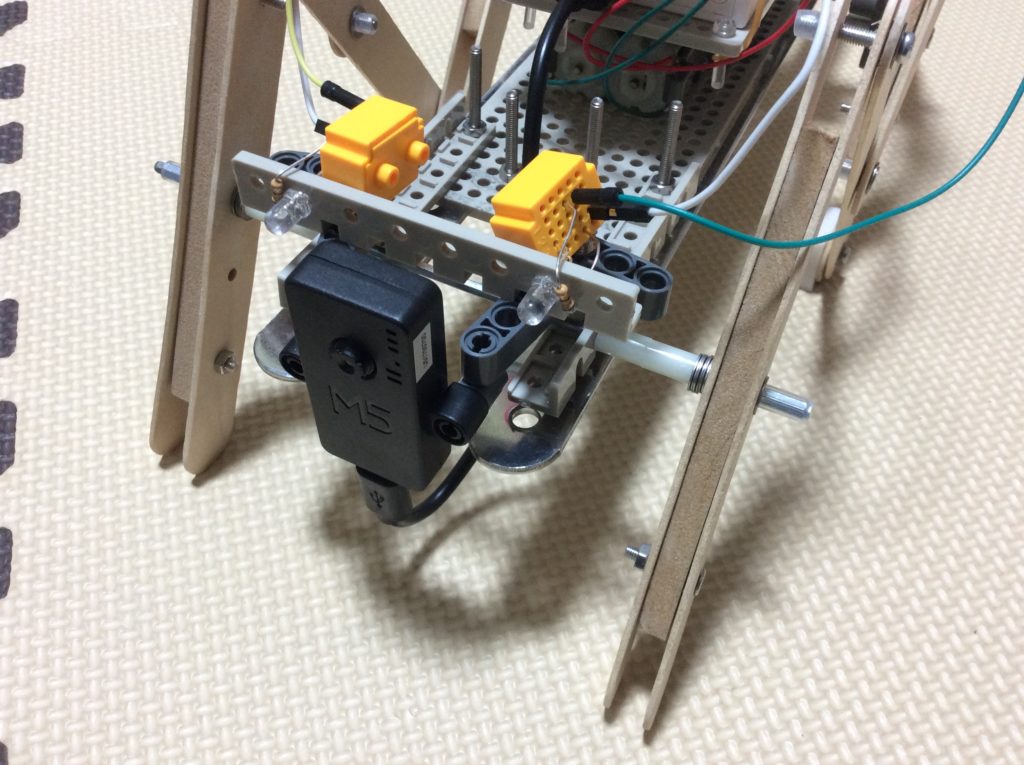
M5CAMERA
M5CAMERAなのですが、調べてたらmgo-tec電子工作さんのHPを見つけました。どうやら、「CameraWebServer」を使った方がもともと入ってるソフトよりも動作が高速らしいとのことでした。そこに書いてあるように、arduino ide のスケッチ例「ESP32」→「Camera」に入っている「CameraWebServer」を使用することにしました。若干の修正が必要らしく、スケッチのcamera_pins.hの
- 43行目 #define SIOD_GPIO_NUM 「25」→22に
- 54行目 #define VSYNC_GPIO_NUM 「22」→25に
それぞれ変更して書き込みしました。これでM5CAMERAからの映像はバッチリです。
M5CAMERAへの給電はArduinoからしたかったのですが、それをしたらフリーズしてしまいました。かと言ってそれが原因なのかは分からないのですが、M5CAMERA専用のモバイルバッテリーを付けた方が無難なのかなと思い、急遽モバイルバッテリーも装着することにしました。
それと、暗いところでも操縦できるようにLEDも装着しました。これもリモコンでON/OFF出来ます。
Arduino nano
今まではArduino unoを使っていたのですが、コンパクトにしたかったので、Arduino nanoに変更しました。今までの経験上、nanoへの変更は結構めんどくさかったのですが、やっぱり今回も修正が必要でしたw
まずHC-06への接続が違っていて、調べたところ、arduino forumのTopic: Cannot configure HC-06 moduleの下の方にある配線図のように、抵抗を使って信号を分圧しなくてはいけません。arduinonanoの接続先は図ではD2、D3ですが、普通にRX、TXで大丈夫でした。
そして次に、リモコンで動かそうとしてもモーターがピーとなってしまって作動しませんでした。もしかして、私が使っているDRV8835モータードライバーとの相性なのかもと思って調べたのですがよくわからずでした。しかしどうやらモーターというよりDRV8835の保護回路が電流過多で作動してしまっているようです?!ということは電源関係なのかなと思い、給電部分をバッテリーモバイルや電池やらを試した結果、9v乾電池をarduino nanoのvinにつなげて、DRV8835のロジック電源とモーター電源の両方をarduino nanoの5Vから給電にしたら動くようになりました(それでもたまにピーとなりますがw)ともかくこれで少しばかりのコンパクト化に成功です。
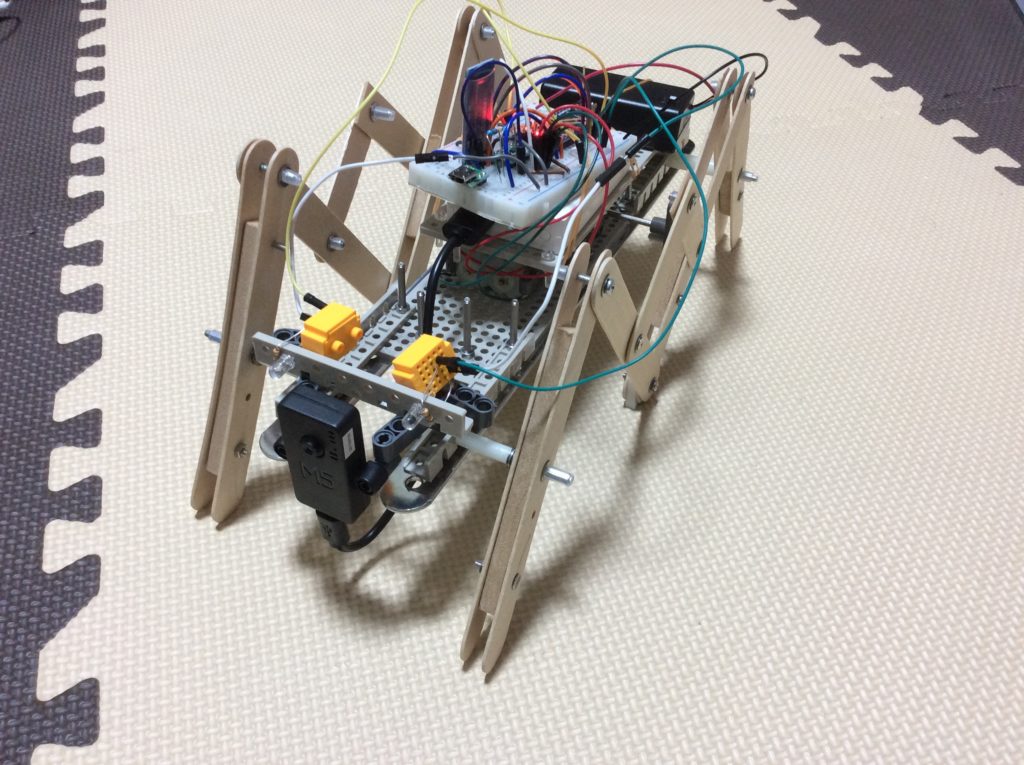
試作機完成
とりあえずゴムでパーツをとめて試作機完成です。
さっそく試運転開始。動画は、暗いところに置いたインセクトマシンのライトをつけるところから始まります。コントロールに使うスマホは本当は一つにまとめたいのですが、現状はM5CAMERA映像受信用のスマホとリモコン操作用のスマホの2台を使っています。
暗いところでもバッチリ映像が見れて、遠隔操作出来ました。(ゴミの日前日なのでちょっと汚いのはご愛敬ということでww)もうちょっと電飾してみようかなとも思ってます。
>工作室へ
 (2 いいね!)
(2 いいね!)

コメント