
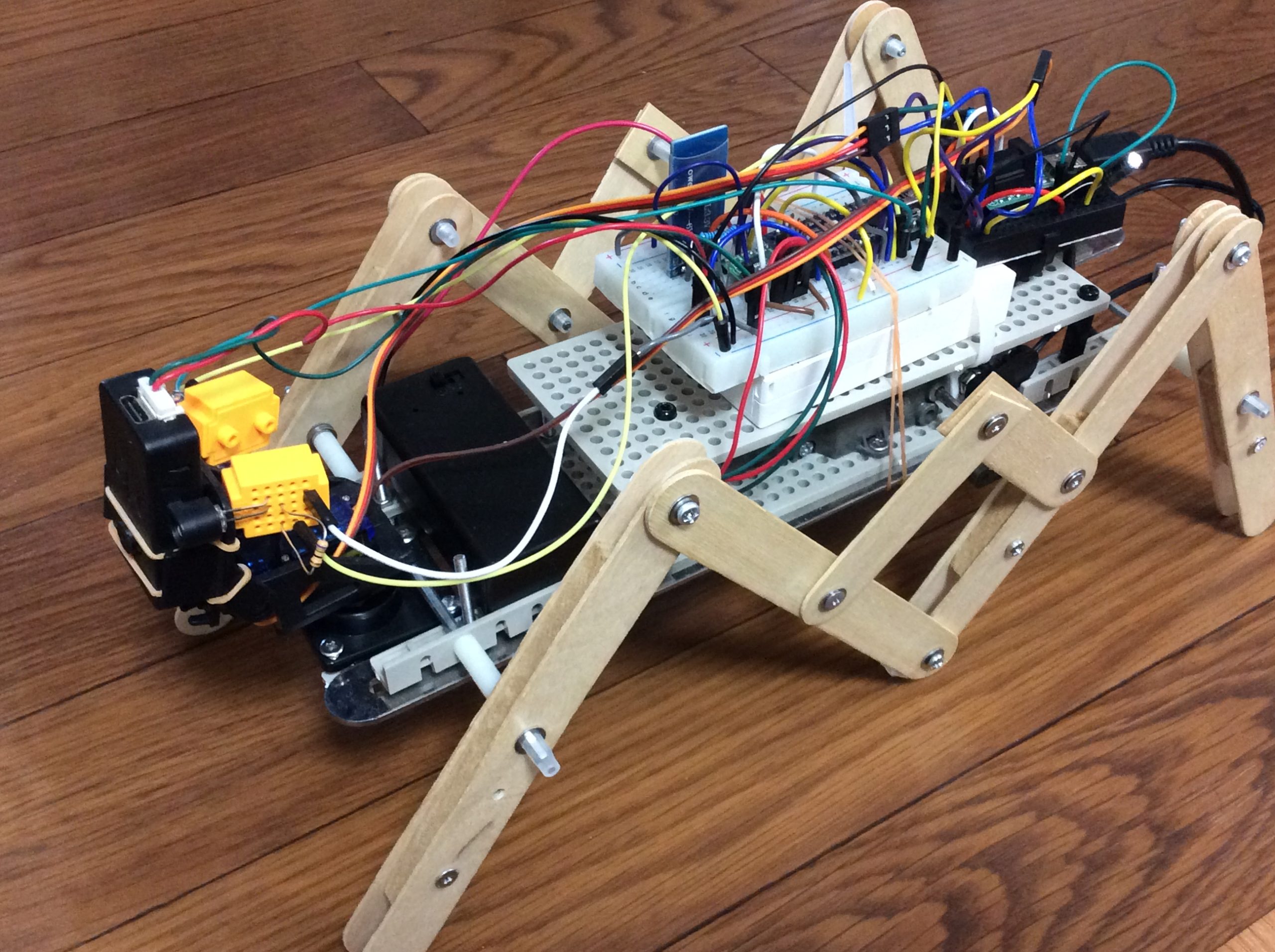
地味に作り続けているインセクトマシンなのですが、とうとう インセクトマシン初号機 が完成しました。
パンチルト機構でカメラを動かせるのですが、試作機ではサーボモーターの反応がイマイチで、何かのタイミングで動いたと思えば、しばらく反応がなくなった後に急にまとめて動いたり、操作が全然安定しませんでした。そこで、思い切って、arduino nano、M5camera、サーボモーターのそれぞれに独立電源を使ってみました。arduinoには9v電池を、M5cameraには9v電池に三端子レギュレーターを使って5vを、サーボモーターには5vのモバイルバッテリーを使用しました。サーボモーターにも9vレギュレーター→5vを使おうとしたのですが、それだと電流が足りないのか、動きが改善されませんでした。ただ、モバイルバッテリーで単独電源なんですが、まだ何かのタイミングで動くが不安定になってしまいますので、今後の改善点にしたいです。
そして、PWMを利用してモーターの速度調節機能も搭載しました。ギアボックスのギア比をスピードモードにしていたため、フルパワーだと本体がガタガタ揺れまくってしまうからですw
ところで、前回悩まされたモーター付近からピーと音が鳴って動かない問題なんですが、当初は「DRV8835の保護回路が電流過多で作動してしまっている」という考えでしたが、いじっているうちに、逆に電圧が低いか電流が低いかのどちらかの問題だと思うようになりました。速度調節機能で速度値が低すぎる場合もピーとなります。もしかしたら、電流や電圧が高すぎても、低すぎてもダメなのかもしれないですね。
そして、LED照明ライトもM5cameraのアームを外したら、ちょうど5mmLEDがぴったり入りました。これで、カメラが動いても映像が常に得られるようになりました。
動いてるところはこんな感じです↓
今度AIロボ君とコラボしてみるのも面白いかもしれませんね~。
>工作室へ
 (1 いいね!)
(1 いいね!)

コメント