

以前作ったインセクトマシンを リモートコントロール バージョンにパワーアップした。arduinoとHC-06 Bluetooth モジュールでスマホでコントロール。モーターもツイン ギアモーターボックス(タミヤ)に変更。モータードライバーはDRV8835使用ステッピング&DCモータドライバモジュール(秋月電子通商)を使用した。 足の部分の、ねじを使用してる関節稼働部分は、シリコンチューブで固定することで動きがスムーズになった。そして、スマホにはアンドロイドのリモコンアプリをダウンロード。ボタン一つでHC06と接続というお手軽さだったw
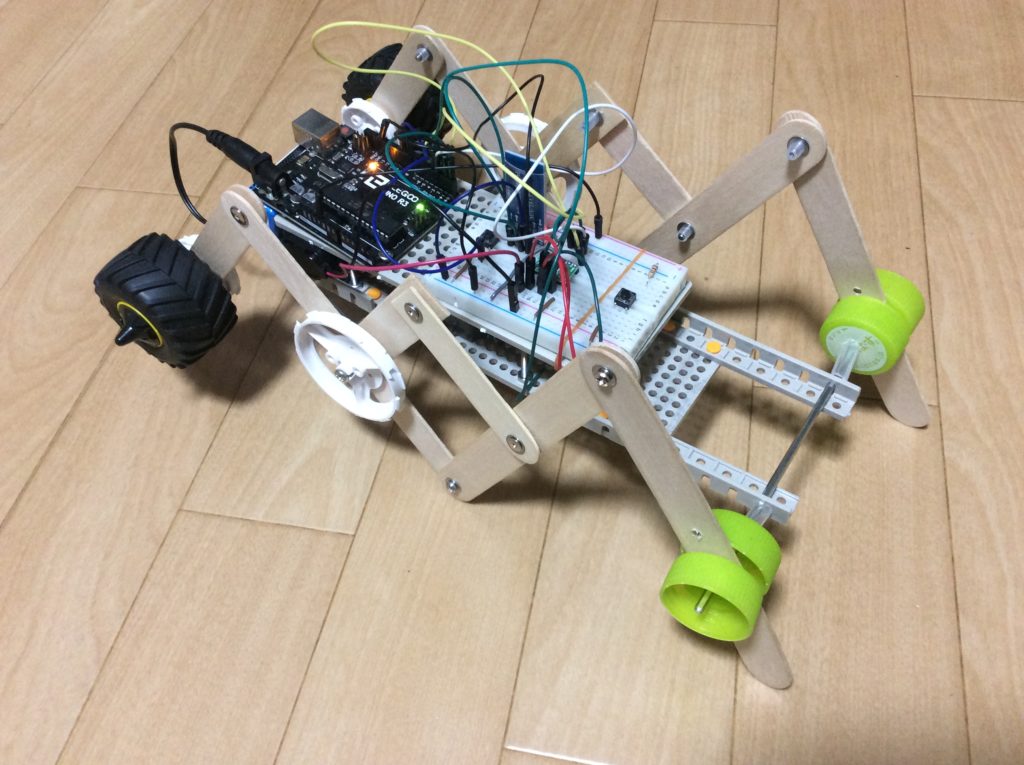
ただ、電池も合わせるとそこそこの重量になって、足が左右にしなってしまう。そこで、色んな空きパーツを軸に補強して、出来るだけ足が真っすぐに動くようにした。
う~ん、床が滑ってイマイチスムーズに動かないのと、足のブレをもうちょっと補強したいな。まぁ、でもそこそこ面白い気がするw
>工作室へ
 (3 いいね!)
(3 いいね!)

コメント